Capstone Batteries
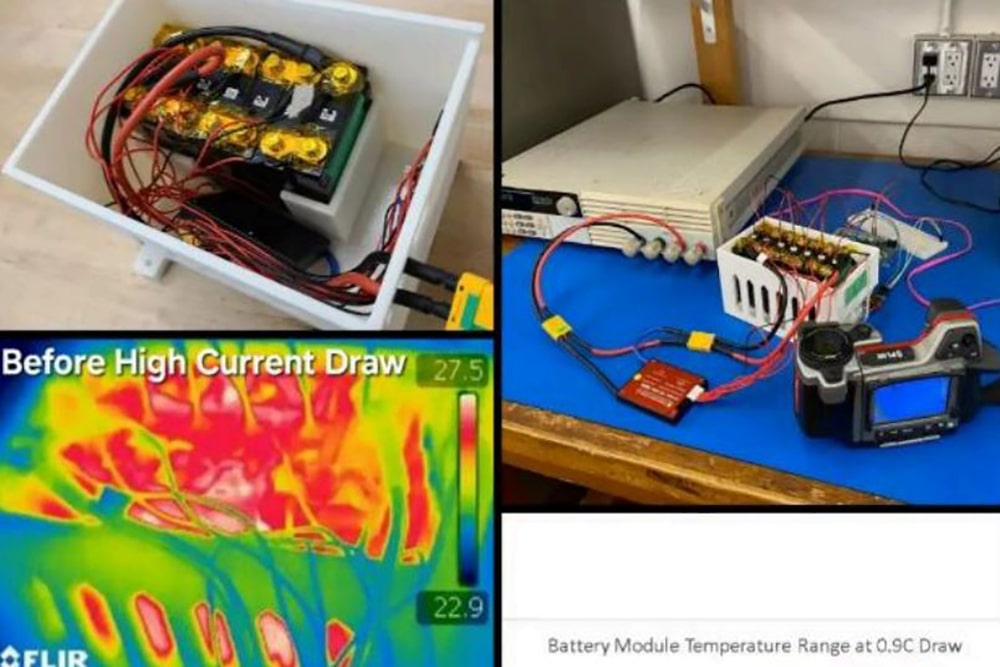
I contributed to the development of a high speed Hyperloop pod by designing and testing a 288 V lithium titanate battery system capable of continuous high current operation. Through detailed charge


I contributed to the development of a high speed Hyperloop pod by designing and testing a 288 V lithium titanate battery system capable of continuous high current operation. Through detailed charge

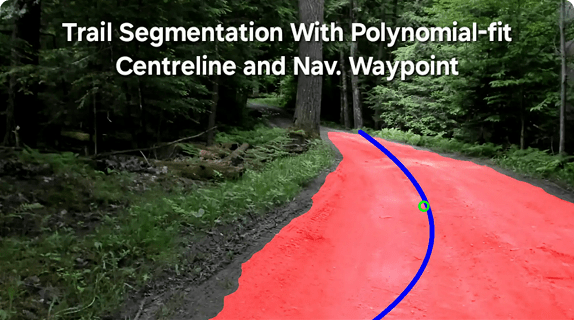
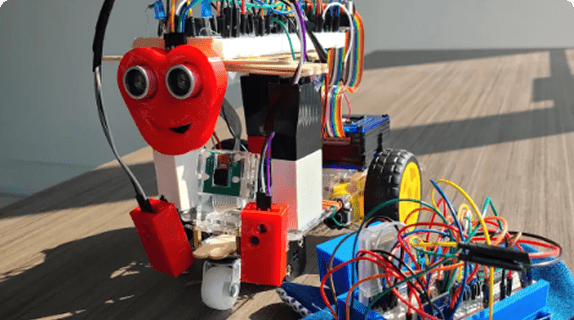
I trained a convolutional neural network for semantic segmentation using a large, custom labeled dataset of outdoor trail images to teach a robot how to recognize and follow paths across diverse terrains. Throug

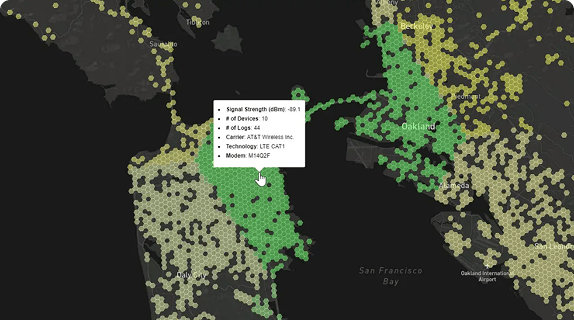
At Geotab, I analyzed global vehicle telemetry data to uncover patterns in cellular signal performance across millions of connected vehicles. Using SQL and Mapbox, I built interactive visualizations that reveale
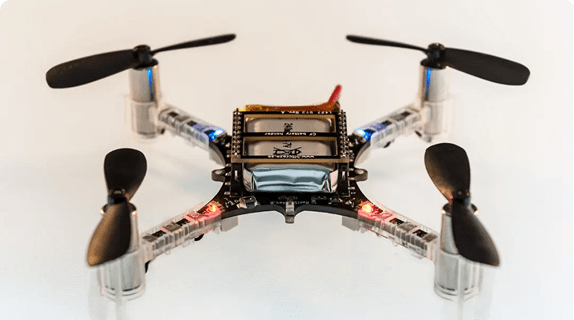
I built an autonomous drone racing system that plans and flies optimal 3D paths through randomized gates in real time. Using RRT* and a custom trajectory optimizer, it handled uncertainty and transferred